

吕先生:139-2288-5557
UVW对位平台使用注意事项
文章出处:张晓 责任编辑:张晓 发表时间:2022-07-06精密对位平台UVW使用上需要注意之处 一般对位平台的检验方式,其是通过将测试顶座设置于该对位平台的x轴及y轴方向,借以操控该对位平台x轴向位移及y轴向位移,进而触碰该顶座来进行测试;然而,此类检测对位平台的配置方式仅能进行x轴及y轴的移动检测,对于目前已研发可斜向位移的对位平台而言,仅有x轴及y轴的检测显然是不足以精准地达到对位平台检测的效果,而且以接触方式所进行的检测,更会因接触产生的推顶阻力而具有偏差值,无法准确及有效地进行检测,则需改善的必要。 以常规对位平台作为解析例子,使用对位平台时候需要注意的是回零的方式 平台结构图 XXY各轴运动方向 等效XYR模型图 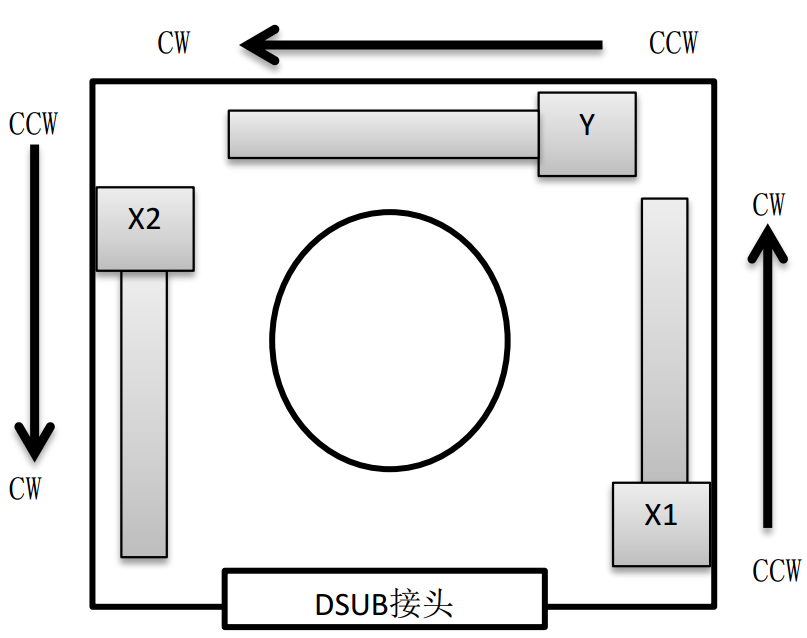
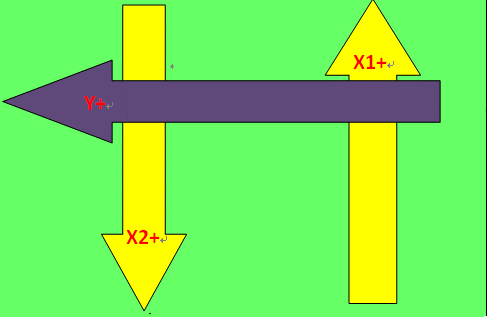
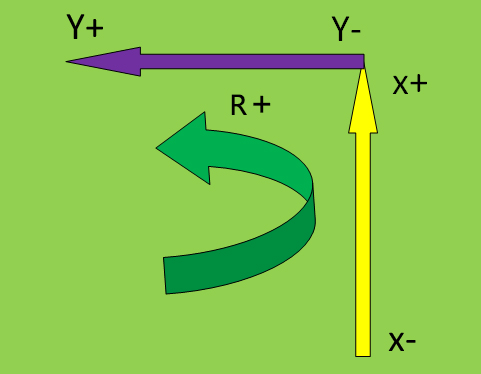
XXY各轴运动方向图所示,X1轴方向往上为正方向运动,往下则为负方向;X2轴往下为正方向运动,往上则为负方向运动;Y轴往左为正方向运动,往右则为负方向运动。按照此方法,等效XYR模型图(R轴表示旋转轴)如图1所示,由于平台的行程有限(±3mm/±2度),所以我们在控制平台回零的时候,需要特别注意,尤其是对X1轴和X2轴的控制方式,建议采用以下方式进行控制:
步骤1:我们先进行X方向回零(X方向由X1轴和X2同时控制来达成),X1轴往正方向运动,X2轴往负方向运动,则往X正方向运动,当X1轴碰到正限位,X2轴碰到负限位后,两个轴(X1和X2)再同时往反方向回零,碰到原点开关完成回零动作。
步骤2:当完成X方向回零后,接下来我们进行Y方向的回零,Y轴往正方向运动,碰到正限位后,再往反方向回零,碰到原点开关完成回零动作。
通过步骤1和步骤2的方式回零后,平台在原点位置,此时X、Y、旋转等可移动的行程达到最大值。这时候运动最为安全,每一次进行对位后,需要进行步骤1和步骤2的动作,将平台回零后再进行下一次的对位动作。
回零方式说明
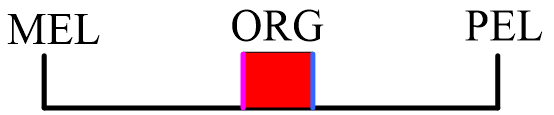
所示,PEL为正限位,MEL为负限位,ORG为原点开关,则回零过程中,需要考虑原点开关的行程,即图2中ORG开关左侧粉色位置到右侧蓝色位置的行程。
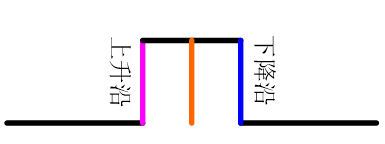
原点开关上升沿到下降沿位置
如上图所示,我们要做到每次回零很精准(上升沿为粉色所在的沿边,下降沿为蓝色所在的位置),需要考虑原点开关的行程(如每次将平台运动到橙色直线所在的位置)。


 扫一扫,手机浏览
扫一扫,手机浏览 扫一扫,进入小程序
扫一扫,进入小程序 扫一扫,关注公众号
扫一扫,关注公众号